So today I extended upon a prior post and implemented face tracking. To do this I hooked my Raspberry Pi up to an Arduino since I didn't feel like figuring out servo control on the Pi. This is fairly straightforward if we relax the granularity of the control. Namely, I can run a common ground then a pan left and pan right wire between the boards. The code will track only the first face it detects by constantly comparing the location of the face to the center of the image, then panning one step (or 5 degrees in my implementation). This approach of using two boards limits what I can do a bit, but due to time constraints it was the only option.
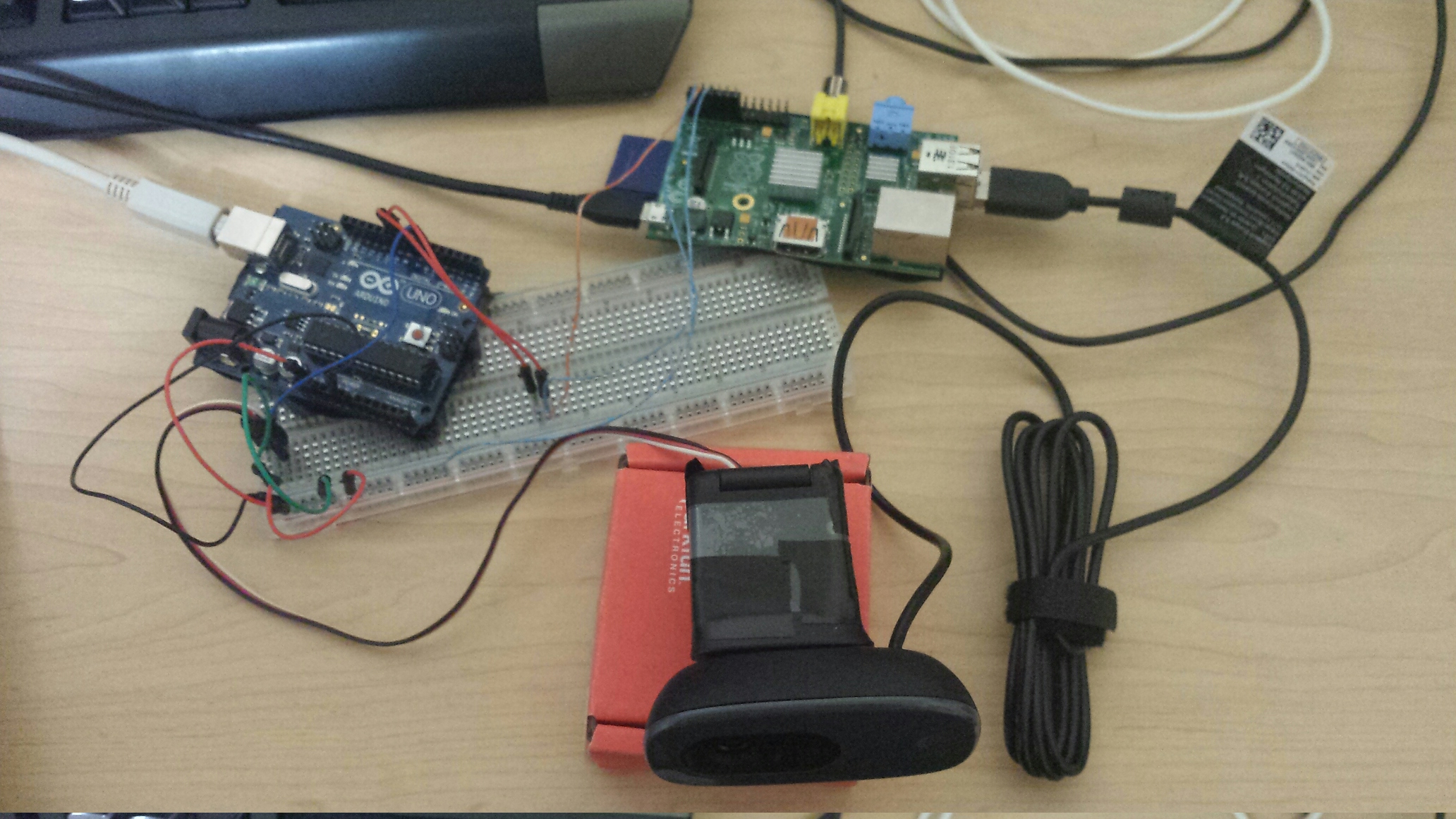
Here is the setup: